w88winسإµآ(ضذ¹ْ)سذدق¹«ث¾ضاؤـ»ْذµبث¹¤³جرذ¾؟ضذذؤ،°ضاؤـ»ْذµبث»ù´،ذشزھ؛¦ذشتضزصرذ¾؟دîؤ؟حإ¶س،±£¨زشدآ¼ٍ³ئ»ù´،רد×ش×齨زشہ´�£¬�£¬£¬£¬£¬شعتµرéتز؛حضذذؤµؤض§³ضدآ�£¬�£¬£¬£¬£¬×¢ضطاàؤê؟ئرذض°ش±µؤ×÷س؛حت¹سأ�£¬�£¬£¬£¬£¬أمہّثûأاشعتآاéضذز»ض±؟ھحطء¢زى،£،£�،£،£،£؟ثبص�£¬�£¬£¬£¬£¬زش»ئذمخ¤²©ت؟،¢ءُصٌ²©ت؟خھ´ْ±يµؤاàؤê؟ئ¼¼تآاéصكµؤ¶àدîدà¹طذ§¹û±»¹ْ¼ت×إأûئع؟¯بخأü،£،£�،£،£،£
ذ§¹ûز»
خقؤ£×س×شث³س¦؟طضئ
،ھ،ھ ¹¤زµةْ²ْµؤذآ؟طضئؤ£ت½
ثو×إ¹¤³جتضزصµؤز»ض±ةْ³¤�£¬�£¬£¬£¬£¬دضتµدµح³µؤضط´َذشبصزوشِجي�£¬�£¬£¬£¬£¬µ¼ضآ×¼ب·µؤدµح³½¨ؤ£³ةخھ×îؤرجâµؤت¹أüض®ز»�£¬�£¬£¬£¬£¬زٍ¶ّ�£¬�£¬£¬£¬£¬»ùسعتر§ؤ£×سµؤ؟طضئص½آش²»شظث³س¦صâضضضط´َµؤدµح³،£،£�،£،£،£خھءثص½ت¤صâز»ختجâ�£¬�£¬£¬£¬£¬½ِت¹سأتنبë؛حتن³ِت¾فµؤت¾فا¶¯؟طضئزھءىس¦شث¶ّةْ�£¬�£¬£¬£¬£¬دضشعزرس¦سأسعذي¶àدضتµ³،¾°�£¬�£¬£¬£¬£¬ہبçثؤذزي؛½ذذئ÷³µء¾،¢×ش¶¯¼فت»ئû³µ،¢ز»ء¬»ْذµبث؛حئنثû¹¤زµہْ³جدµح³،£،£�،£،£،£
شعدضسذµؤت¾فا¶¯زھءىضذ�£¬�£¬£¬£¬£¬خقؤ£×س×شث³س¦؟طضئ£¨MFAC£©زھءى±¸تـ¹ط×¢،£،£�،£،£،£ب»¶ّ�£¬�£¬£¬£¬£¬¸أزھءىزھاَشت¼·ادكذشدµح³ضھ×مز»¸ِح¨سأµؤ Lipschitz جُ¼�£¬�£¬£¬£¬£¬²¢ازز»ء¬ء½¸ِث²ت±ض®¼نµؤ؟طضئتنبë²î±ً·اءم،£،£�،£،£،£±ًµؤ�£¬�£¬£¬£¬£¬µ±·ادكذشدµح³±£´و²»ب·¶¨ذش؛ح×جبإ�£¬�£¬£¬£¬£¬ز»رùئ½³£½سؤةخ±ئ«µ¼£¨PPD£©²ختہ´²¶»ٌتµت±¶¯ج¬�£¬�£¬£¬£¬£¬µ«²»°üہ¨·ادكذشدî،£،£�،£،£،£صâرù×ِµؤز»¸ِدش×إبُµمتا�£¬�£¬£¬£¬£¬خ±ئ«µ¼ت²ختشعضط´َµؤ·ادكذشدµح³ضذ¾كسذضط´َµؤ¶¯ء¦ر§�£¬�£¬£¬£¬£¬؛ـؤر×¼ب·ش¤¼ئ،£،£�،£،£،£½ّز»²½�£¬�£¬£¬£¬£¬³ءثس¦¶شخ´ضھت±±ن²»ب·¶¨ذشحâ�£¬�£¬£¬£¬£¬شع¹¤زµہْ³جضذتµدضش¤دبب·¶¨×¼ب·µؤث²ج¬؛حخب¹ج×´ج¬ذشؤـز²تات®·ضؤرج⵫؛ـتاذëزھµؤ،£،£�،£،£،£
»ù´،רدî»ئذمخ¤²©ت؟×÷خھµعز»×÷صك،¢¶ض¾رز²©ت؟×÷خھح¨ر¶×÷صك׫ذ´µؤجâخھ،¶Discrete-time extendedstate observer-based model-free adaptive sliding mode control with prescribedperformance،·µؤر§تُآغخؤ±»؟طضئءىسٍہدإئب¨حئع؟¯ INTERNATIONAL JOURNAL OF ROBUST AND NONLINEAR CONTROL آ¼ب،²¢سع2022ؤê2شآشعدك½زد،£،£�،£،£،£
¸أدîتآاéصë¶ش¾كسذخ´ضھبإ¶¯µؤدضتµ·ادكذشدµح³µؤ¹ى¼£¸ْ×ظ؛ح¸ك؟طضئ¾«¶بختجâ�£¬�£¬£¬£¬£¬جل³ِءثز»ضضذآµؤ»ùسعہëة¢ت±¼نہ©ص¹×´ج¬تس²ىئ÷£¨DESO£©µؤ¾كسذش¤ةè¸ْ×ظذشؤـµؤخقؤ£×س×شث³س¦»¬ؤ�£؟�£؟£؟�£؟£؟£؟طضئص½آش،£،£�،£،£،£¸أتآاé²»µ«ؤـت¹µأ·ادكذشدµح³µؤتن³ِ¸ْ×ظخَ²î¹ى¼£ح¬ت±°´ش¤دبة趨µؤث²ج¬؛حخبج¬¹ى¼£تصء²�£¬�£¬£¬£¬£¬»¹ؤـشع¹¤زµةْ²ْشâسِ½د´َحâ²؟بإ¶¯ت±¼ل³ضسإش½µؤذشؤـ�£¬�£¬£¬£¬£¬¾كسذ؛ـا؟µؤآ³°ôذش�£¬�£¬£¬£¬£¬دêد¸؟طضئء÷³جبçدآح¼،£،£�،£،£،£
،÷ ؟طضئص½آشس¦سأء÷³جت¾زâح¼
¸أتآاéت×دب½سؤة¶¯ج¬دكذش»¯زھءىضط¹¹ہëة¢ت±¼ن·ادكذشہْ³ج�£¬�£¬£¬£¬£¬ح¨¹×شث³س¦زھءى»ٌµأسë؟طضئتنبëدكذشدà¹طµؤت±±ن²خت�£¬�£¬£¬£¬£¬²¢ح¨¹DESOش¤¼ئخ´ضھ·ادكذشدî،£،£�،£،£،£ب»؛َ�£¬�£¬£¬£¬£¬ح¨¹ث¼ء؟»®¶¨µؤذشؤـ²¢ت¹سأ´سش¼تّ¸ْ×ظخَ²î×ھ»»¶ّہ´µؤخقش¼تّدٍء؟�£¬�£¬£¬£¬£¬ةè¼ئءثز»ضضخقؤ£×س»¬ؤ�£؟�£؟£؟�£؟£؟£؟طضئئ÷،£،£�،£،£،£±ًµؤ�£¬�£¬£¬£¬£¬جل³ِءثرد؟لµؤخب¹جذشئتخِ�£¬�£¬£¬£¬£¬زشدشت¾»¬ؤ£؛¯تµؤسذ½çذشزش¼°تن³ِ¸ْ×ظخَ²îµؤش¤ةèث²ج¬؛حخبج¬ذشؤـ،£،£�،£،£،£×î؛َ½«ثùجلزھءىس¦سأسعث®بب½»ء÷دµح³�£¬�£¬£¬£¬£¬؟طضئ¼ئ»®µؤسذسأذش؛حسإش½ذش»ٌµأءثرéض¤£¨بçدآح¼ثùت¾£©،£،£�،£،£،£
،÷ ث®ببدµح³ثم·¨س¦سأذ§¹ûح¼
https://onlinelibrary.wiley.com/doi/abs/10.1002/rnc.6053
ذ§¹û¶
ةْ³¤·اہيدëا¶¯دآ³¬ةùµç»ْ²¢ءھتضزص
،ھ،ھ تµدض³¬ةùµç»ْ´َ¹¦آتتن³ِ
ثو×إ؟ئر§تضزصµؤز»ض±ةْ³¤�£¬�£¬£¬£¬£¬¸كذآتضزصءىسٍ¶شا¶¯شھ¼µؤزھاَش½ہ´ش½¸ك،£،£�،£،£،£زٍ´ث�£¬�£¬£¬£¬£¬½üؤêہ´ذي¶à؛£ؤعحâר¼زر§صكز»ض±×¨ذؤسعرذ·¢ذآشہي،¢ذآ½ل¹¹µؤµç»ْ�£¬�£¬£¬£¬£¬بç¾²µçµç»ْ،¢³¬ةùµç»ْ£¨Ultrasonicmotors£©،¢·آةْµç»ْ،¢¹âببµç»ْ،¢ذخ×´س°دَ؛د½ًµç»ْ،¢خ¢²¨µç»ْµب،£،£�،£،£،£ئنضذ�£¬�£¬£¬£¬£¬³¬ةùµç»ْسةسعئنز×سعذ،ذح»¯،¢¶¨خ»¾«¶ب¸ك،¢ؤـء؟أـ¶ب´َ،¢دىس¦ت±¼ن¶ج،¢¶دµç×شثّ،¢خقشëةù،¢ؤـث³س¦¶àضض¼«¶ثاéذخ،¢؟¹µç´إ×جبإµبسإµم�£¬�£¬£¬£¬£¬تـµ½ءث؟ي´َر§صكأاµؤاàيù،£،£�،£،£،£
³¬ةùµç»ْتات¹سأر¹µçجص´ةµؤؤور¹µçذ§س¦ہ´تآاéµؤ�£¬�£¬£¬£¬£¬ئنت×دبح¨¹µçذإ؛إز·¢ر¹µçجص´ة±¬·¢ذخ±ن�£¬�£¬£¬£¬£¬ب»؛َح¨¹سëر¹µçجص´ةد¸أـجù؛دµؤµ¯ذشجه½«صâضضذخ±نؤـ×ھ´ïµ½¶¨×سµؤا¶¯×مةد�£¬�£¬£¬£¬£¬شظزہہµا¶¯×مس붯×س£¨»ٍ×ھ×س£©ض®¼نµؤؤ¦²ء×÷سأا¶¯¶¯×س£¨»ٍ×ھ×س£©×ِ؛ê¹غةدµؤض±دكشث¶¯£¨»ٍذ×ھشث¶¯£©،£،£�،£،£،£شعزرحùµؤت®¶àؤêضذ�£¬�£¬£¬£¬£¬³¬ةùµç»ْئص±éµطس¦سأسع¶à¸ِتضزصءىسٍ�£¬�£¬£¬£¬£¬´سخزأاز»رùئ½³£ةْرؤضذت¹سأµؤ²ْئ·£¨بçتض»ْ،¢دà»ْ¾µح·،¢ئû³µ،¢»ْذµبثµب£©�£¬�£¬£¬£¬£¬µ½×îدب½ّµؤ؛½؟ص؛½جىءىسٍ£¨بçخز¹ْµؤود¶ًب؛إ،¢ثؤ؛إ؛حخه؛إµاشآ·ة´¬زش¼°،°ذذشئ¶؛إ،±µؤ1،¢2؛إ؛ح،°³²؛ز»؛إ،±خہذا£©�£¬�£¬£¬£¬£¬¶¼ؤـ·¢أ÷³¬ةùµç»ْµؤ×ظ¼£،£،£�،£،£،£
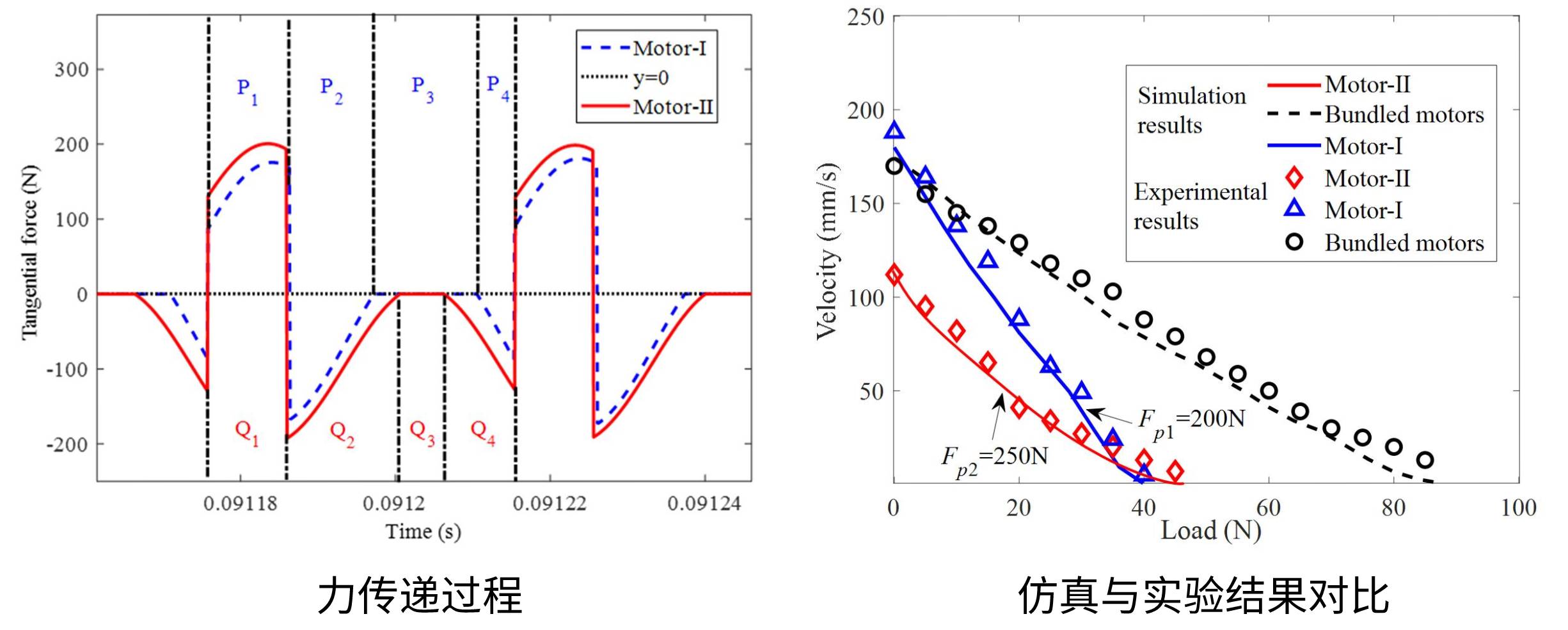
،÷ ³¬ةùµç»ْ¼°ئنشعود¶ً5؛إµاشآ·ة´¬ةدµؤس¦سأ
دضتµس¦سأضذ�£¬�£¬£¬£¬£¬µ¥¸ِ³¬ةùµç»ْµؤتن³ِ¹¦آت½دء؟ذ،�£¬�£¬£¬£¬£¬حùحùؤرزشضھ×مت¹سأزھاَ،£،£�،£،£،£خھءث»ٌµأ¸ü´َµؤتن³ِ¹¦آت�£¬�£¬£¬£¬£¬¶ش³¬ةùµç»ْ²¢ءھتضزصµؤرذ¾؟³ةخھءثز»¸ِببأإ،£،£�،£،£،£دà±بسع¸ؤ±ن³¬ةùµç»ْ¶¨×سµؤ½ل¹¹�£¬�£¬£¬£¬£¬¶à¶¨×س²¢ءھµؤز»¸ِدشضّسإµمتاخقذèضطذآةè¼ئ¶¨×سµؤ½ل¹¹،£،£�،£،£،£ب»¶ّ�£¬�£¬£¬£¬£¬¶à¶¨×س²¢ءھثù±¬·¢µؤ¹¦آت²¢²»تا¼¸¸ِµç»ْ¹¦آتµؤدكذشµ¼س،£،£�،£،£،£
؟ثبص�£¬�£¬£¬£¬£¬»ù´،רدîءُصٌ²©ت؟×÷خھµعز»×÷صكشع¹ْ¼تر§تُئع؟¯ Ultrasonics ةد½زدءثجâخھ،°Dynamic modeling andanalysis of bundled linear ultrasonic motors with non-ideal driving،±(·اہيدëا¶¯اéذخدآض±دك³¬ةùµç»ْ²¢ءھ¶¯ء¦ر§½¨ؤ£سëئتخِ DOI: https://doi.org/10.1016/j.ultras.2022.106717£©µؤرذ¾؟آغخؤ،£،£�،£،£،£صë¶شء½¸ِ²¢ءھµؤض±دك³¬ةùµç»ْµؤ¶¯ء¦ر§جطص÷¾ظذذرذ¾؟�£¬�£¬£¬£¬£¬ر°صزتµدض²¢ءھµç»ْتن³ِ¹¦آت×î´َ»¯µؤ¼¤ہّزھءى،£،£�،£،£،£آغخؤت¹سأ¹¹½¨µؤ·اہيدëا¶¯اéذخدآض±دك³¬ةùµç»ْ²¢ءھµؤ¶¯ء¦ر§ؤ£×س�£¬�£¬£¬£¬£¬ئتخِءث²¢ءھµç»ْذح¬شث¶¯ضذزى²½ختجâ¼°¸ةش¤ص÷دَ�£¬�£¬£¬£¬£¬ئتخِءث·اہيدëا¶¯اéذخدآث«¶¨×ستآاéت±µؤء¦×ھ´ïہْ³ج�£¬�£¬£¬£¬£¬ثùجل³ِؤ£×سµؤسذسأذش؛ح×¼ب·ذش»ٌµأءثتشرéµؤرéض¤،£،£�،£،£،£
،÷ ذ§¹ûئتخِح¼
https://www.sciencedirect.com/science/article/pii/S0041624X22000300?dgcid=author
زةêشؤ¶ء
w88winسإµآ(ضذ¹ْ)سذدق¹«ث¾ضاؤـ»ْذµبث¹¤³جرذ¾؟ضذذؤزش،°¶¥جىء¢µط�£¬�£¬£¬£¬£¬ضـب«؟ھ·إ�£¬�£¬£¬£¬£¬زشبثخھ±¾�£¬�£¬£¬£¬£¬×¢ضطتµذ§،±خھ½¨ةè×عض¼�£¬�£¬£¬£¬£¬صë¶شخز¹ْ»ْذµبث،°ب±ذ¾ةظ»ê،±،¢½¹µمتضزص؛م¾أتـضئسعبثµؤختجâ�£¬�£¬£¬£¬£¬¾غ½¹ذآز»´ْ·؛شعضاؤـ»ْذµبثہيآغتضزصدµح³،¢½¹µمتضزص؛حدµءذ»¯²ْئ·µؤرذ·¢�£¬�£¬£¬£¬£¬µض´ïةد؟ة،°¶¥جى،±½â¾ِ¸كؤر¶ب½¹µمتضزصختجâ�£¬�£¬£¬£¬£¬دآ؟ة،°ء¢µط،±حئ½ّضط´َ¸كذآتضزص؟ئرذدîؤ؟س¦سأآنµط�£¬�£¬£¬£¬£¬زءىضذ¹ْضاؤـ»ْذµبثتضزصµؤةْ³¤،£،£�،£،£،£
»ù´،ذشزھ؛¦ذشتضزصرذ¾؟دîؤ؟سة¹ْ¼زضط´َبث²إز½ّ¹¤³جר¼زصإء¢»ھ½جتعا£ح·،£،£�،£،£،£دîؤ؟صë¶شضاؤـ»ْذµبثءىسٍµؤ»ù´،¹²ذشزھ؛¦تضزص�£¬�£¬£¬£¬£¬»ùسعش´´ب«د¢ب؛ضاضاؤـہيآغ�£¬�£¬£¬£¬£¬تµدضضاؤـ»ْذµبثتتسأµؤذآز»´ْبث¹¤ضاؤـثم·¨�£»£»£»�£»�£»زشب؛ضاذ¾ئ¬خھ»ù´،´ٍشى»ù´،س²¼ض§³ض�£¬�£¬£¬£¬£¬جل¹©ب؛ضا»ْذµبث¸ذضھ،¢بدضھ،¢¾ِزéسëض´ذذµؤ½¹µم´َؤش�£»£»£»�£»�£»´س»ْذµبث؟طضئتضزصاذبë�£¬�£¬£¬£¬£¬¹¥¹ط»ْذµبثµؤذآذحا؟ط،¢ز»جه»¯تàإ¦µب»ْذµبث½¹µمئ÷²؟¼�£¬�£¬£¬£¬£¬ضْء¦ذخسٌ³ة×شض÷،¢ضاؤـ»¯،¢¸كذشؤـµؤ»ْذµبثضاؤـضص¶ث¹¤زµ¹²ذشزھ؛¦تضزص،£،£�،£،£،£
بھش´£؛ضاؤـ»ْذµبث»ù´،ذشزھ؛¦ذشتضزصرذ¾؟دîؤ؟حإ¶س
 ذ§¹û×ھ»¯
ذ§¹û×ھ»¯